特色
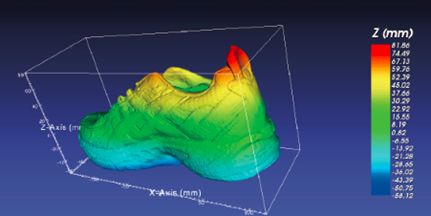
3D 工業機器人視覺模組可以搭配主流的機器人手臂, 快速手臂視覺定位,可由工業機器人工程師立即部署。穿鞋帶時,不需要人去驅使機器人進行多次的學習,而是透過3D視覺模組辨識鞋子的洞口位置,再導引協作機器人將鞋帶精準穿入鞋洞,並依序迅速完成。
效益
已經能少於一分鐘完成穿鞋帶動作,超越鞋廠作業員的速度,而且不會有倦怠或出錯的問題。

3D 工業機器人視覺模組可以搭配主流的機器人手臂, 快速手臂視覺定位,可由工業機器人工程師立即部署。穿鞋帶時,不需要人去驅使機器人進行多次的學習,而是透過3D視覺模組辨識鞋子的洞口位置,再導引協作機器人將鞋帶精準穿入鞋洞,並依序迅速完成。
已經能少於一分鐘完成穿鞋帶動作,超越鞋廠作業員的速度,而且不會有倦怠或出錯的問題。